WiMi Hologram Cloud Inc. (NASDAQ: WIMI) (“WiMi” or the “Company”), a leading global Hologram Augmented Reality (“AR”) Technology provider, today announced that its R&D team is developing a human-robot collaboration system based on digital twin technology. The system aims to stimulate human potential, enhance human skills with humans at the core, and realize the integration of human-robot collaboration. The system supervises and predicts the digital model of humans and robots by mapping the twin objects of humans and robots in the physical and digital worlds. By accumulating knowledge of human-robot collaboration skills, experiences, and interaction characteristics, the system can coordinate the construction of decision-making and innovation mechanisms. The system integrates the flexibility and adaptability of humans and the efficiency and accuracy of the robots to promote a qualitative leap and development of human-robot relationships.
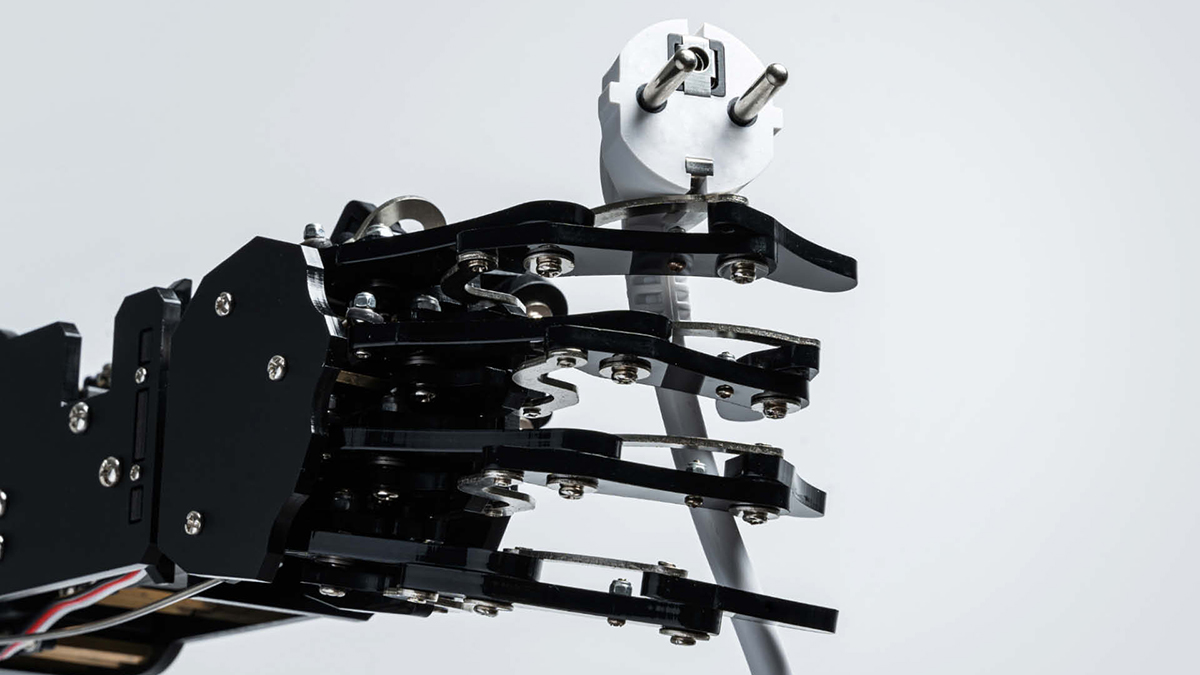
Firstly, based on various physical sensing devices, the system will acquire human operation behavior’s image or video information. Then the system inputs this information into the perception system, extracts the multidimensional features of human behavior, and employs deep learning algorithms to solve the action strategy for the current state. In the decision system, the results of the perception are evaluated. The decision behaviors that satisfy the requirements are displayed through an interactive visual interface to guide human action selection through dynamic guidelines.
The next step is to construct a digital twin space, a real-time mapping of the physical entity space. The physical entity adopts the digital representation form to build its corresponding virtual model and simulate the behavior of the physical entity in the natural environment. The digital twin technology can enhance the implicit information expression of physical entities through the interactive feedback between the virtual and physical ends and the behaviors of data fusion, data analysis, and decision optimization.
While in the actual physical space, the human, robot, and environmental tasks are constantly interacting and iterating, and their related information data are transported to the twin space for optimization and computation, and real-time feedback is provided on the processing results. Through continuous iterative optimization, the performance of each system is improved so that the human-robot collaboration system can operate better.
Digital twin technology can meet the adaptive nature of human-robot collaboration systems. The technology achieves virtual mapping through interactive feedback between virtuality and reality, data fusion analysis, and iterative optimization of decisions. The dynamic changes of the virtual model are used as feedback in the virtual space and output in the physical space in the form of an interactive interface display.
The digital twin-based human-robot collaboration system developed by WiMi enables humans and robots to share, coordinate, allocate, and use resources and information in physical and information spaces through direct contact or indirect interaction. Based on the human-centered principle, the two share the right to control and make decisions about the system, execute system planning, and jointly improve skills to achieve work goals. Using communication, computing, and other technologies, WiMi builds digital twins of human and physical entities and enhances the flexibility and adaptability of human and physical entities interacting in the physical world through human-robot collaboration. Human-robot collaboration is an inevitable trend in the development of AI, and the future world will be a society in which humans and AI live together in harmony.